研究実績・成果
研究実績・成果
共同研究成果の公表 化学 眞山 博幸 准教授
アメンボが水面を移動する際の中脚の脚力の直接測定に初めて成功 新規開発の計測システムで従来技術より正確な脚力測定を実現 アメンボの脚の撥水機能を応用した水面移動型超小型ロボットなどの開発に貢献
茨城大学大学院理工学研究科(工学野)の上杉 薫 助教、旭川医科大学化学の眞山 博幸 准教授、大阪大学大学院工学研究科の森島 圭祐 教授の研究グループは、アメンボが水面を移動する際の脚力を、直接測定と画像解析によって明らかにしました。
水面を滑らかに移動するアメンボをめぐっては、その表面微細機能を真似た高い撥水機能をもつ産業・工業製品の提案や水面移動型超小型ロボットの開発、撥水機能獲得に関する進化のメカニズム解明が進められています。こうした研究を進める上で、アメンボがどの程度の力で脚を漕いで水面を叩いているかは重要な情報となりますが、従来のように画像解析や推進力から算出する手法では移動時のエネルギーロスが十分に考慮されていなかったり、計算による誤差が存在するなど、正確な脚力が測定できているとは言えませんでした。また、アメンボの身体全体の推進力からの脚力の導出も報告されていますが、脚一本の力を直接測定しているわけではないのでこの方法も正確ではない可能性がありました。
そこで本研究グループでは、アメンボの脚一本の脚力を直接計測できるシステムを構築しました。高い撥水機能が求められるセンサ接続用のプローブ(探針)は、アメンボの脚の一部を切り取って流用することで、水面に捕らわれることを防ぐことができました。また、高速度カメラと画像解析を用いて加速度から脚力を導出する間接測定も併せて行いました。
その結果、中脚の中央部(腿節-脛節間)における脚力は2.17ミリニュートン程度で、モーメントの原理からアメンボ脚先端(跗節+前跗節)での脚力を計算すると0.96ミリニュートンでした。一方、画像解析から得られたアメンボ中脚の脚力は約0.49ミリニュートンであり、画像解析ではエネルギーロス等による過小評価が生じる可能性が示唆されました。
今後は、本研究グループが提案してきたアメンボ撥水モデルに今回の測定値を導入し、より詳しい撥水理論の展開を試みるとともに、高性能の応用製品の開発への貢献を目指します。
この成果は、2023年11月17日、Cyborg and Bionic Systems(オンライン版)に掲載されました。
背景
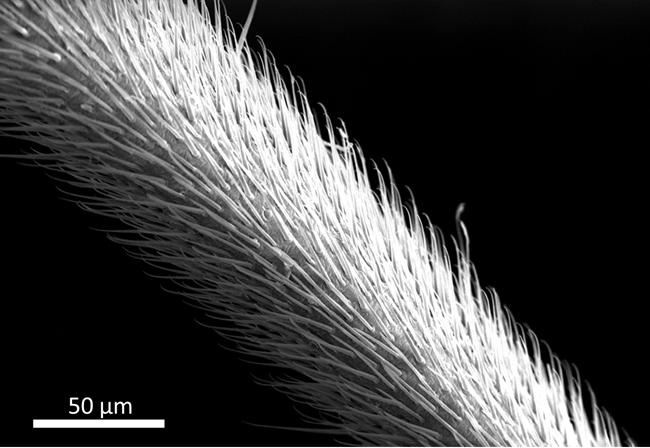
自然界には表面にナノ・マイクロメートルスケールの微小構造を持つ生物が多数存在します。中でも,アメンボは体表面に直径数マイクロメートル,長さ数十マイクロメートルの毛を無数に持ち(図1),毛の隙間に空気の層を作って撥水機能を獲得することで,水面で長期間,溺れることなく生活できます。また,強い撥水性を持った脚で水面を叩き,跳ねることで,自由に水面を高速移動することができます。
アメンボの持つこうした撥水機能については,生物学的・工学的観点から多くの研究が報告されています。例えば,アメンボは昆虫の中では比較的新しい種ですが,アメンボの進化の過程を探る上で撥水機能の獲得は大きな鍵になります。また,近年ではバイオミメティクス(注1)的観点から,アメンボの持つ表面微細機能を真似た高い撥水機能を持つ産業・工業製品の提案や,撥水機能を有した水面移動型超小型ロボットの開発も進められており,本研究グループでもアメンボの撥水機構に関して研究を進めてきました。
これらの開発を進める上で,アメンボがどの程度の力で脚を漕いで水面を叩いていているかは重要な情報となります。アメンボが水面を蹴った際,脚と水面の間に発生する水圧が大きすぎると,水が毛の隙間に入り込み,撥水性能が失われてしまいます。また,水面を蹴る力が強いと脚の先端が水面を突き破ってしまい,十分な推進力が得られず,水面を突き破らなかったとしても,水面の持つ粘弾性特性や脚-水面間での摩擦,波の発生,空気抵抗などの様々な要因によるエネルギーロスが発生します。こうしたエネルギーロスの影響を受けず,純粋かつ正確な脚力の情報が求められているのです。
アメンボの脚力評価はこれまでも行われてきました。例えば,アメンボの移動の様子を高速度カメラで撮影し,水面波の形状やアメンボの加速度情報から脚力を割り出すような,画像解析による間接的な力測定が報告されています。しかしこの方法では脚力を直接的に測っていない上に,上述したようなエネルギーロスも力情報に混入しており,正確な脚力が測れているとは言えません。他方,直接的な力測定方法として,アメンボの身体に力センサを取り付け,水面移動した力を測定して脚力を割り出す方法も報告されていますが,この方法でも,身体全体の推進力から計算値で脚力を導出しているため,正確な脚力が測定できているとは言えません。
そこで本研究グループでは,アメンボの脚一本の脚力を直接計測するシステムを構築し,より正確な脚力測定を試みました。更に,その計測結果と画像解析による間接測定の結果から,それぞれの測定の差異や特徴を比較しました。
研究手法
本研究グループでは,アメンボの脚一本の脚力を直接計測できるシステムを構築しました。
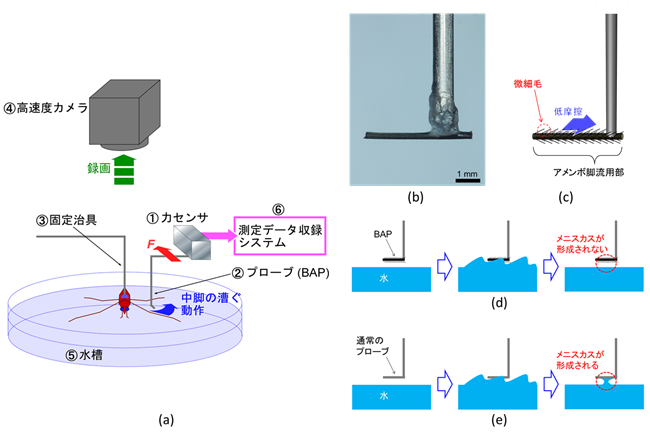
生育環境に近い状態でのアメンボの挙動を得るために,アメンボは水を満たした水槽上に自然な姿勢で設置して,力測定センサに接続されたプローブ(探針)を脚のそばの水面付近に設置しました(図2a,図3)。アメンボは水面付近にいるときのみ,自然に水面を叩き移動する行動を示すため,水面付近に設置することで自然な移動挙動における脚力が測定できます。しかし,アメンボが脚を漕いで水面が波立つと,メニスカス(注2)の作用によってプローブが水面に接触してしまい,正確な力測定が行えません。そこで,本研究グループは,プローブにも高性能な撥水機能を持たせるため,その材料としてアメンボの脚に注目しました。アメンボの脚の一部を切り取り,プローブとして流用することで(bio-appropriating probe: BAP),プローブがメニスカスによって水面に捕らわれることはなくなりました(図3右)。
また,画像測定による推定脚力と直接測定した脚力とで差が表れるかを評価するため,高速度カメラでアメンボが水面を動く様子を観察し,この時の加速度からアメンボ脚一本当たりの脚力を導出する画像解析による測定も併せて行いました。高速度カメラを用いて,1秒間1000コマの動画を撮影し,画像データから推進時のアメンボの加速度を導出しました。そして導出した加速度から推進力を計算し,中脚一本当たりの力を推定しました(図2b)。
試料には,日本国内に広く分布し,比較的体が大きいナミアメンボ(Aquarius paludum paludum)の雌を用いました。測定に際しては,最も推進に寄与していると考えられる中脚の脚力を測定しました。
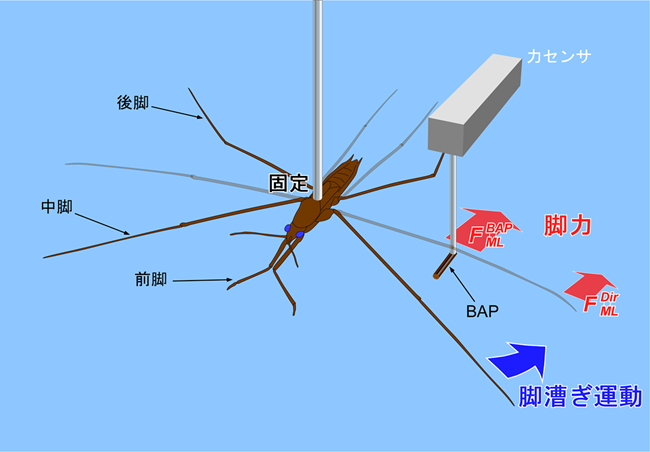
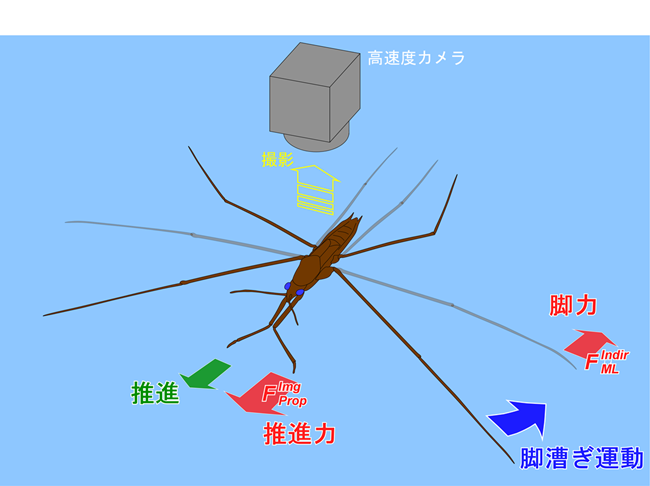
図2 アメンボ中脚の脚力測定
研究結果
この手法により,アメンボが水面を叩き推進する際の,中脚1本の直接脚力測定に世界で初めて成功しました。
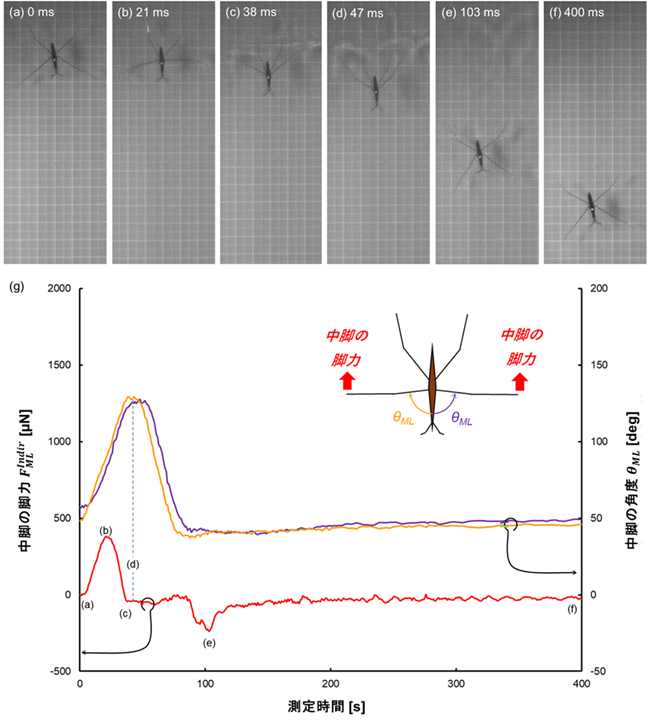
計測の結果,中脚の中央部(腿節-脛節間)における脚力は約2.17ミリニュートンで,モーメントの原理からアメンボ脚先端(跗節+前跗節)での脚力を計算すると0.96ミリニュートンでした(図4)。一方,画像解析から得られたアメンボ中脚の脚力は約0.49ミリニュートンであり,直接測定の値の半分程度でした(図5)。これは,水面の持つ粘弾性特性によるエネルギーロスや摩擦・空気抵抗,波の発生といった様々なエネルギーロスによって,計測から導出される脚力が実際よりも小さな値になっているからだと考えられます。さらに,画像解析の際は,アメンボは移動していることから,足掛かりとなる水面が相対的に後退しており,これによって,脚から水面へのエネルギー伝達効率が落ちていることも考えられます。また,脚力測定をしている他の研究との比較・考察も行いました。
これまで,アメンボの脚力に関して,直接測定を行い,直接測定と間接測定を比較している研究は存在しませんでした。本研究結果によって,画像解析から脚力を見積もる際には,その値が実際の脚力の半分程度になっている可能性があることが示唆されました。
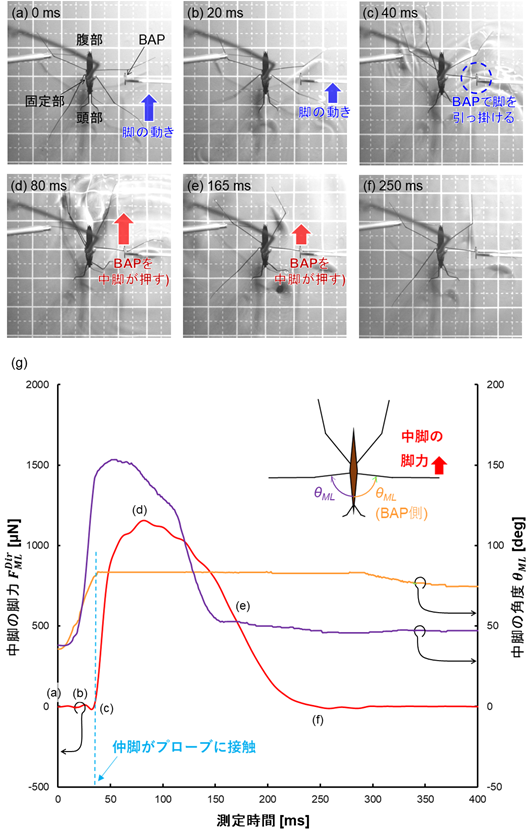
図4 アメンボの直接脚力測定の様子(a-f)と測定された脚力,及び脚の角度(g)
今後の展望
本研究によってアメンボの中脚の脚力を直接測定し,正確な値が測定できました。また,従来の画像解析により導出した脚力や,身体全体の直接力測定から算出した脚力との比較も行いました。
なお,今回は,従来研究(画像解析により導出された脚力や,身体全体の推進力から算出した脚力)との比較もあり,1軸での直接力測定(水面に対して水平で,推進方向に対して逆向きの力)を行いましたが,今後は2軸力センサを用いることで,別の軸(アメンボが水面から持ち上がる,もしくは沈む方向.水面に垂直な方向)の直接力測定も同時に行っていきます。
また,これまで本研究グループが提案してきたアメンボ撥水モデルに,今回測定した脚力を導入し,より詳しい撥水理論の展開を試みていきます。更に,アメンボの脚や微細毛の機械的特性も測定し,本結果と組み合わせることで力学モデルの展開も試みます。
論文情報
タイトル:Analysis of rowing force of the water strider middle leg by direct measurement using a bio-appropriating probe and by indirect measurement using image analysis
著者:Kaoru Uesugi, Hiroyuki Mayama, Keisuke Morishima
雑誌:Cyborg and Bionic Systems
公開日:2023/11/17
DOI:10.34133/cbsystems.0061
※本研究は、科学研究費助成事業(科研費)の基盤研究(C)「生物表面に存在する微細構造の変形と接着/摩擦機能を同時に評価できるシステムの開発」による助成を受けて実施したものです。
用語説明
(注1)バイオミメティクス……生物の持つ様々な機能を,工業的な目的のために模倣・応用すること。身近な例として,面ファスナーは植物(俗に言う「ひっつき虫」)の絡み付き機構を模倣して開発された。
(注2)メニスカス……表面と液体が接触した際に形成される液面の屈曲。水の入ったコップの壁面付近で水の表面が曲面を描くのも同じ現象。